ใบงานที่ 7 การจัดการอุปกรณ์
โดยนายพลวัต เทพศร รหัสนักศีกษา6031280058
ลักษณะของอุปกรณ์ (Device Characteristic)
อุปกรณ์อินพุต-เอ้าต์พุต (Input/Output Device)
อุปกรณ์เก็บข้อมูล (Storage Device)
อุปกรณ์อินพุต-เอ้าต์พุต (Input/Output Device)
อุปกรณ์อินพุต คืออุปกรณ์ที่ทำให้คอมพิวเตอร์สามารถสัมผัสและรับรู้สิ่งต่าง ๆ จากโลกภายนอกได้ เช่น เครื่องอ่านบัตร คีย์บอร์ด เมาส์

อุปกรณ์เอ้าต์พุต คือ อุปกรณ์ที่ทำให้คอมพิวเตอร์ ควบคุมหรือส่งผลออกมาสู่โลกภายนอกได้ เช่น จอภาพ เครื่องพิมพ์
แบ่งได้เป็น 2 ประเภทคือ
อุปกรณ์ชนิดข้อมูลเป็นสาย (Stream)
อุปกรณ์ชนิดข้อมูลไม่เป็นสาย (Non-Stream)

อุปกรณ์ชนิดข้อมูลเป็นสาย (Stream)
ข้อมูลที่ส่งเข้าออกจะเรียงมาเป็นลำดับก่อนหลัง
การแบ่งแยกข้อมูลทำได้โดยตรวจสอบลำดับของข้อมูล
สามารถจัดการได้ง่าย
อุปกรณ์เหล่านี้ได้แก่ คีย์บอร์ด เครื่องพิมพ์

อุปกรณ์ชนิดข้อมูลไม่เป็นสาย (Non-Stream)

ข้อมูลที่ส่งและรับไม่ขึ้นอยู่กับลำดับการส่ง
ต้องอาศัยข้อมูลเพิ่มเติมเพื่อที่จะแยกแยะข้อมูลแต่ละตัวและมีวิธีจัดการโดยเฉพาะ
อุปกรณ์ชนิดนี้ได้แก่ จอภาพ

อุปกรณ์เก็บข้อมูล (Storage Device)
เป็นอุปกรณ์เก็บข้อมูลที่คอมพิวเตอร์ใช้เก็บข้อมูลต่าง ๆ
ข้อมูลสามารถถูกดึงหรือเรียกกลับมาใช้ได้ในภายหลัง
แบ่งเป็น 2 ประเภทคือ
อุปกรณ์ที่มีการเข้าถึงแบบลำดับ (Serial Access Storage Device)
อุปกรณ์ที่มีการเข้าถึงโดยตรง (Direct Access Storage Device)
อุปกรณ์ที่มีการเข้าถึงแบบลำดับ (Serial Access Storage Device)
การเข้าถึง (Access) ต้องเป็นไปตามลำดับ เรียงไปจนถึงตำแหน่งที่ต้องการ
การเก็บข้อมูลจะเก็บเป็นกลุ่ม ๆ ไม่มีแอดเดรสของแต่ละกลุ่ม การอ่านต้องอ่านเข้ามาทีละกลุ่มแล้วตรวจสอบว่าเป็นกลุ่มที่ต้องการหรือไม่จนพบข้อมูล
อุปกรณ์พวกนี้ได้แก่ เทป

อุปกรณ์ที่มีการเข้าถึงโดยตรง (Direct Access Storage Device)
ข้อมูลจะถูกจัดไว้เป็นกลุ่มในระดับบล็อกหรือ เซกเตอร์ แต่ละกลุ่มจะมีแอสเดรสของตัวเอง
การเข้าถึงทำได้โดยกำหนดแอดเดรสของข้อมูลกลุ่มนั้นทำให้การเข้าถึงสามารถเข้าถึงได้โดยตรงไม่ต้องผ่านข้อมูลกลุ่มอื่น
อุปกรณ์พวกนี้ได้แก่ ดิสก์

ตัวควบคุมอุปกรณ์ (Device Controller)
อุปกรณ์แต่ละประเภทจะประกอบด้วยกลไกต่าง ๆ และส่วนที่เป็นวงจรอิเล็กทรอนิกส์
สำหรับส่วนที่เป็นวงจรอิเล็กทรอนิกส์เราเรียกว่าชิพ ที่ประกอบรวมกันอยู่บนเซอร์กิตบอร์ด (Circuit board) ซึ่งส่วนนี้เองที่ถูกเรียกว่า ตัวควบคุมอุปกรณ์
ตัวควบคุมอุปกรณ์ทำหน้าที่ควบคุมการทำงานของอุปกรณ์ ตรวจสอบและแก้ไขข้อผิดพลาดเมื่อเกิดขึ้น
ในแต่ละอุปกรณ์ก็จะมีตัวควบคุมอุปกรณ์นั้น ๆ เช่น
ตัวควบคุมจอภาพ หรือรู้จักกันในนามของการ์ดจอภาพ
ตัวควบคุมดิสก์ หรือรู้จักกันในนามของดิสก์คอนโทรเลอร์ (Disk Controller)
ตัวขับอุปกรณ์ (Device drivers)
อุปกรณ์แต่ละชนิดย่อมมีลักษณะที่แตกต่างกันออกไปในหลาย ๆ อย่าง ทั้งการติดต่อรับส่งข้อมูล การควบคุมการทำงานภายในอุปกรณ์
ถ้าเราให้ OS เป็นผู้ควบคุมทุกอุปกรณ์ ตัว OS จะต้องรู้การทำงานของอุปกรณ์แต่ละชนิดอย่างละเอียด รวมทั้งกรณีที่มีการพัฒนาอุปกรณ์ใหม่ ๆ ขึ้นมาก็จะต้องมีการแก้ไขให้ OS รู้จักอุปกรณ์ตัวใหม่อยู่ตลอดเวลา
ด้วยความไม่สะดวกดังกล่าวผู้ออกแบบ OS จึงได้ทำการแยกเอาส่วนควบคุมอุปกรณ์ทั้งหมดออกจากระบบ โปรแกรมที่แยกตัวออกมานั้นมีหน้าที่ควบคุมการ ติดต่อกับอุปกรณ์เหล่านั้นเราเรียกว่า ตัวขับอุปกรณ์ (Device drivers)


หน้าที่ของ OS ในการจัดการอุปกรณ์
ติดตามสถานะของอุปกรณ์ทุกชิ้น โดยจะมี UCB (Unit control block) สำหรับอุปกรณ์แต่ละชิ้นเพื่อเก็บข้อมูลที่สำคัญต่าง ๆ ของอุปกรณ์นั้น ๆ
กำหนดการให้ใช้งานเมื่อมีการร้องขออุปกรณ์โดยมีเทคนิคอยู่ 3 ประการ
การยกให้ (Dedicated device) เป็นการกำหนดให้อุปกรณ์ถูกใช้ได้โดยโปรเซสเพียงโปรเซสเดียว โปรเซสอื่น ๆ จะเข้ามาใช้อุปกรณ์ตัวนี้ไม่ได้
การแบ่งปัน (Shared device) เป็นการกำหนดให้อุปกรณ์ถูกใช้ได้โดยหลายโปรเซสร่วมกัน ไม่เป็นของโปรเซสใดโปรเซสหนึ่ง
การปลอม (Virtual device) เป็นการจำลองอุปกรณ์ชิ้นหนึ่งให้เป็นอุปกรณ์อีกชิ้นหนึ่ง
จัดสรร (Allocate) อุปกรณ์ เพื่อมอบหมายอุปกรณ์ชิ้นนั้นให้โปรเซสที่ร้องขอ
เรียกคืน (Deallocate) อุปกรณ์เมื่อโปรเซสที่ครอบครองอุปกรณ์ทำงานจบลง หรือต้องการคืนอุปกรณ์ให้กับระบบ
ควบคุมและขัดจังหวะการรับส่งข้อมูลระหว่างอุปกรณ์กับซีพียู หรือหน่วยความจำ
การรับส่งข้อมูลระหว่าง CPU กับอุปกรณ์
เมื่อโปรเซสต้องการส่งข้อมูลให้กับอุปกรณ์ต่าง ๆ ข้อมูลที่จะส่งจะถูกเก็บไว้ในหน่วยความจำ
การส่งจะกระทำโดย CPU เป็นผู้ดึงข้อมูลมาจากหน่วยความจำและส่งไปให้อุปกรณ์ต่าง ๆ
ในทางกลับกันเมื่ออุปกรณ์ต่าง ๆ ต้องการส่งข้อมูลให้โปรเซส ข้อมูลจะถูกส่งผ่าน CPU ไปไว้ในหน่วยความจำ จากนั้นโปรเซสจึงนำข้อมูลไปใช้ได้
วิธีการรับส่งข้อมูล มีอยู่ 3 วิธี ได้แก่
การพอลลิ่ง (Polling)
การอินเตอร์รัพต์ (Interrupt)
เมลบ็อกซ์ (Mailbox)
การพอลลิ่ง (Polling)
ลักษณะการติดต่อแบบนี้คือ ทุก ๆ ช่วงเวลาหนึ่งซีพียูจะหยุดงานที่ทำอยู่ชั่วคราวและไปตรวจเช็คที่แต่ละแชนเนลเพื่อดูว่ามีอุปกรณ์ใดต้องการส่งข้อมูลบ้างตั้งแต่ตัวแรก-ตัวสุดท้าย จนกระทั้งหมดซีพีจะกลับไปทำงานตามเดิม
การอินเตอร์รัพต์ (Interrupt)
เมื่ออุปกรณ์ตัวใดต้องการส่งข้อมูล จะส่งสัญญาณผ่านทางแชนแนลไปบอกซีพียู เมื่อซีพียูทราบก็จะหยุดงานชั่วคราวแล้วไปรับรับส่งข้อมูลจนเสร็จสิ้น แล้วกลับไปทำงานต่อ
เมลบ็อกซ์ (Mailbox)
ระบบจะเสียเนื้อที่ส่วนหนึ่งไปเพื่อเป็นที่พักของข้อมูลเมื่อมีอุปกรณ์บางตัวต้องการส่งข้อมูล ก็จะส่งไปเก็บไว้ในเนื้อที่ส่วนนี้ เมื่อถึงระยะเวลาหนึ่งซีพียูจะหยุดงานที่ตัวเองทำไปรับส่งข้อมูลเสร็จแล้วก็จะไปทำงานที่ค้างไว้ต่อ

ดังนั้นถ้าสามารถส่งข้อมูลได้โดยไม่ต้องผ่าน CPU ก็จะทำให้การรับส่งข้อมูลเร็วขึ้น และยังสามารถใช้ CPU สำหรับรันโปรเซสอื่นได้ต่อไป
วิธีการนี้เรียกว่า การทำ DMA (Direct Memory Access)

การรับส่งข้อมูลแบบ DMA จำเป็นต้องใช้ ตัวควบคุม DMA (DMA Controller)
DMA Controller จะทำหน้าที่แทน CPU เมื่อต้องการรับส่งข้อมูลแบบ DMA
เมื่อต้องการส่งข้อมูล DMA Controller จะส่งสัญญาณไปบอกให้ CPU รับรู้
เมื่อ CPU ได้รับคำขอ CPU จะสั่งให้ DMA Controller ทำงานควบคุมการรับส่งข้อมูลต่อไป ส่วน CPU จะไปทำงานอื่น
เมื่อทำงานเสร็จ DMA Controller จะส่งสัญญาณไปบอกให้ CPU รับรู้ว่าการรับส่งข้อมูลเสร็จสิ้นแล้ว
การจัดการสื่อจัดเก็บข้อมูล (Storage Management)
สื่อจัดเก็บข้อมูลในที่นี้หมายถึงหน่วยความจำสำรอง (Secondary Storage) ที่ใช้ในการจัดเก็บข้อมูล
ได้แก่ ดิสก์แม่เหล็ก (Magnetic disk) เช่น ฮาร์ดดิสก์ ฟล็อปปี้ดิสก์

ดิสก์ (Disk)
การจัดเนื้อที่บนดิสก์แม่เหล็กจะมีการจัดแบ่งออกเป็น ไซลินเดอร์ (cylinder)
ในแต่ละไซลินเดอร์จะแบ่งออกเป็นแทร็ก (track)
ในแต่ละแทร็กจะแบ่งออกเป็นเซ็กเตอร์ (sector)

การจัดเก็บข้อมูลลงในดิสก์นั้นจะเก็บในรูปแบบของบล็อก (Block) ขนาดของบล็อกปกติจะมีขนาด 512 Byte แต่ละบล็อกจะอยู่เรียงตามลำดับในแต่ละเซกเตอร์ โดยเซ็กเตอร์ 0 จะเป็นเซ็กเตอร์แรกของแทร็กแรกซึ่งอยู่ที่ไซลินเดอร์ด้านนอกสุดของดิสก์

การเรียงลำดับหมายเลขแทร็กและหมายเลขไซลินเดอร์จะเรียงต่อกันไปเรื่อย ๆ จากด้านนอกสุดไปด้านในสุดของดิสก์
การจัดเวลาการใช้ดิสก์ (Disk scheduling)
การใช้งานดิสก์ให้มีประสิทธิภาพนั้นสามารถพิจารณาได้จากระยะเวลาที่ใช้ในการอ่านหรือบันทึกข้อมูล ซึ่งเวลาที่ใช้นั้นขึ้นอยู่กับปัจจัย 3 อย่าง ดังนี้
ระยะเวลาการค้นหา (seek time) หมายถึงระยะเวลาที่ใช้ในการเคลื่อนที่หัวอ่านไปยังไซลินเดอร์ที่มีเซ็กเตอร์ที่ต้องการ
ระยะเวลาที่ใช้หมุนดิสก์ (rotational latency) หมายถึงที่ระยะเวลาที่รอคอยการหมุนดิสก์เพื่อหาเซ็กเตอร์ที่ต้องการให้ตรงกับหัวอ่าน
ระยะเวลาการโอนย้ายข้อมูล (transfer time)
ระยะเวลาการค้นหาเป็นปัจจัยที่สำคัญมากที่สุด ดังนั้นการลดระยะเวลาการค้นหาลงจะทำให้การใช้งานดิสก์มีประสิทธิภาพมากขึ้น
เวลาในการเข้าถึงข้อมูล = เวลาค้นหา+เวลาหมุนดิสก์+เวลาถ่ายเทข้อมูล
การจัดเวลาในการใช้ดิสก์นั้นแบ่งออกเป็น 5 แบบดังนี้
การจัดเวลาแบบมาก่อนได้ก่อน (First come first served : FCFS)
การจัดเวลาแบบเวลาสั้นสุดได้ก่อน (Shortest seek time first : SSTF)
การจัดเวลาแบบสแกน (SCAN Scheduling)
การจัดเวลาแบบซีสแกน (Circular-SCAN Scheduling)
การจัดเวลาแบบ LOOK (Look Scheduling)
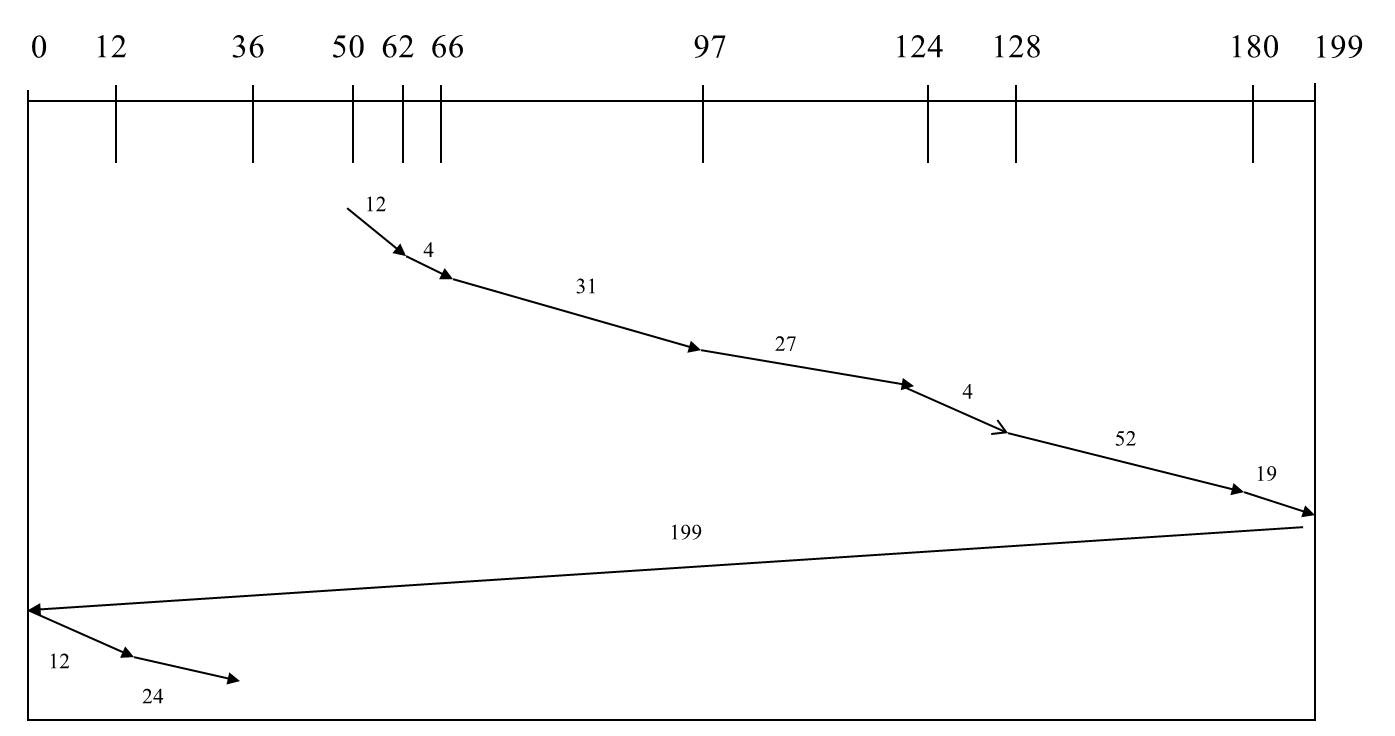
การจัดเวลาแบบมาก่อนได้ก่อน First come first served : FCFS
เป็นรูปแบบการจัดเวลาที่ง่ายที่สุด แต่ไม่ใช่วิธีของการทำงานที่เร็วที่สุด
เช่นถ้าลำดับการอ่านข้อมูลจากไซลินเดอร์เป็นดังนี้ 97 , 180 , 36 , 124 , 12 , 128 , 62 , 66 ปัจจุบันไซลินเดอร์ 50
ลักษณะการเคลื่อนที่ของหัวอ่านจะเคลื่อนที่ดังรูป
การจัดเวลาแบบเวลาสั้นสุดได้ก่อน Shortest seek time first : SSTF

รูปแบบการทำงานจะเป็นลักษณะของการที่หัวอ่านจะเคลื่อนที่ไปยังไซลินเดอร์ที่ใกล้ที่สุดก่อนแล้วจึงเคลื่อนไปยังไซลินเดอร์ที่ไกลออกไป
เช่นถ้าลำดับการอ่านข้อมูลจากไซลินเดอร์เป็นดังนี้ 97 , 180 , 36 , 124 , 12 , 128 , 62 , 66 จากลำดับที่ให้มาถ้าเริ่มต้นหัวอ่านอยู่ที่ไซลินเดอร์ที่ 50
ตัวอย่าง : จงเรียงลำดับการเคลื่อนที่ของหัวอ่านพร้อมทั้งวาดรูปประกอบ

ลำดับการอ่านข้อมูลจากไซลินเดอร์เป็นดังนี้ 97 , 180 , 36 , 124 , 12 , 128 , 62 , 66
วิธีการเคลื่อนที่แบบ FCFS 50, 62, 66, 36, 12, 97, 124, 128, 180
หัวอ่านจะต้องเคลื่อนที่ทั้งหมด 238 ไซเลนเดอร์
ข้อเสียแบบ SSTF
การคอยใช้บริการที่อาจจะไม่ได้รับการบริการ เช่น มีการเรียกใช้ไซเลนเดอร์ 12 และ 180 ในขณะที่หัวอ่านอยู่ที่ ไซเลนเดอร์ 12 นั้นมีการเรียกใช้ ไซเลนเดอร์ที่อยู่ใกล้ 12 เข้ามา ซึ่งการขอเรียกใช้ไซเลนเดอร์ที่ใกล้ 12 ก่อน ซึ่ง ไซเลนเดอร์ 180 ต้องคอยก่อน
การจัดแบบ SSTF ยังไม่ใช่วิธีการดีที่สุด สามารถปรับวิธีการลดการเคลื่อนที่หัวอ่านให้น้อยลงได้อีก ดังตัวอย่าง

ลำดับการอ่านข้อมูลจากไซลินเดอร์เป็นดังนี้ 97 , 180 , 36 , 124 , 12 , 128 , 62 , 66
วิธีการเคลื่อนที่แบบ FCFS 50, 36, 12, 62, 66, 97, 124, 128, 180
การจัดเวลาแบบเวลาสั้นได้ก่อน Shortest Seek Time First : SSTF
หัวอ่านจะต้องเคลื่อนที่ทั้งหมด 206 ไซเลนเดอร์
การจัดเวลาแบบเวลา SCAN
รูปแบบการทำงานจะเป็นลักษณะของการที่หัวอ่านจะเริ่มอ่านที่ด้านใดด้านหนึ่งของดิสก์ (ต้องทราบทิศทาง) และจะเคลื่อนที่ไปยังอีกด้านหนึ่ง และจะให้บริการก็ต่อเมื่อหัวอ่านเคลื่อนที่ไปถึงที่ไซลินเดอร์นั้น
เช่นถ้าลำดับการอ่านข้อมูลจากไซลินเดอร์เป็นดังนี้ 97 , 180 , 36 , 124 , 12 , 128 , 62 , 66 จากลำดับที่ให้มาถ้าเริ่มต้นหัวอ่านอยู่ที่ไซลินเดอร์ที่ 50 ถ้าหัวอ่านเคลื่อนที่ต่อไปยังไซลินเตอร์ 0
ตัวอย่าง : จงเรียงลำดับการเคลื่อนที่ของหัวอ่านพร้อมทั้งวาดรูปประกอบ
การจัดเวลาแบบ SCAN

ลำดับการอ่านข้อมูลจากไซลินเดอร์เป็นดังนี้ 97 , 180 , 36 , 124 , 12 , 128 , 62 , 66
วิธีการเคลื่อนที่แบบ FCFS 50, 36, 12, 62, 66, 97, 124, 128, 180
หัวอ่านจะต้องเคลื่อนที่ทั้งหมด 230 ไซเลนเดอร์
การจัดเวลาแบบเวลา C-SCAN
รูปแบบการทำงานจะเป็นลักษณะเหมือน SCAN ต่างกันตรงที่เมื่อหัวอ่านเคลื่อนที่ถึงอีกด้านหนึ่งของดิสก์เมื่อไหร่ หัวอ่านจะเคลื่อนย้ายกลับไปอีกด้านหนึ่งของดิสก์ทันทีโดยไม่มีการให้บริการในระหว่างเคลื่อนย้าย (ไปจนสุด-กลับจนสุด)
เช่นถ้าลำดับการอ่านข้อมูลจากไซลินเดอร์เป็นดังนี้ 97 , 180 , 36 , 124 , 12 , 128 , 62 , 66 จากลำดับที่ให้มาถ้าเริ่มต้นหัวอ่านอยู่ที่ไซลินเดอร์ที่ 50
ตัวอย่าง : จงเรียงลำดับการเคลื่อนที่ของหัวอ่านพร้อมทั้งวาดรูปประกอบ
การจัดเวลา C-SCAN
ลำดับการอ่านข้อมูลจากไซลินเดอร์เป็นดังนี้ 97 , 180 , 36 , 124 , 12 , 128 , 62 , 66
วิธีการเคลื่อนที่แบบ FCFS 50, 36, 12, 62, 66, 97, 124, 128, 180
หัวอ่านจะต้องเคลื่อนที่ทั้งหมด 384 ไซเลนเดอร์
การจัดเวลาแบบเวลา LOOK
รูปแบบการทำงานจะเป็นลักษณะเหมือน SCAN และ C-SCAN ต่างกันตรงที่เมื่อหัวอ่านจะเคลื่อนที่กลับทันทีเมื่อหมดไซลินเดอร์ที่ขอใช้บริการในด้านนั้น ๆ หัวอ่านจะไม่เคลื่อนที่ไปจนสุดด้านใดด้านหนึ่ง
เช่นถ้าลำดับการอ่านข้อมูลจากไซลินเดอร์เป็นดังนี้ 97 , 180 , 36 , 124 , 12 , 128 , 62 , 66 จากลำดับที่ให้มาถ้าเริ่มต้นหัวอ่านอยู่ที่ไซลินเดอร์ที่ 50
ตัวอย่าง : จงเรียงลำดับการเคลื่อนที่ของหัวอ่านพร้อมทั้งวาดรูปประกอบ
การจัดเวลา LOOK

ลำดับการอ่านข้อมูลจากไซลินเดอร์เป็นดังนี้ 97 , 180 , 36 , 124 , 12 , 128 , 62 , 66
วิธีการเคลื่อนที่แบบ FCFS 50, 36, 12, 62, 66, 97, 124, 128, 180
หัวอ่านจะต้องเคลื่อนที่ทั้งหมด 322 ไซเลนเดอร์
การจัดการเนื้อที่บนดิสก์ (Disk Management)

Boot Block
เมื่อเปิดเครื่องคอมพิวเตอร์จำเป็นที่จะต้องมีโปรแกรมเริ่มต้น ซึ่งจะทำหน้าที่ตรวจสอบและอ่านค่าที่จำเป็นทั้งหมดในระบบว่าระบบคอมพิวเตอร์พร้อมทำงานหรือไม่ โปรแกรมนี้มีชื่อว่า Bootstrap ซึ่งจะถูกเก็บไว้ในดิสก์ในพาร์ติชั่นที่เรียกว่า Boot block ซึ่งดิสก์ที่มี Boot Block เก็บอยู่จะเรียกว่า Boot Disk
Bad Block
เซกเตอร์เสีย หมายถึง ข้อมูลที่อ่านมาจากเซ็กเตอร์นั้นมีค่าไม่ตรงกับค่าที่ได้มีการบันทึกลงไป
bad block เป็นข้อบกพร่องจากโรงงาน จะมีวิธีจัดการคือ คอนโทรลเลอร์ทำหน้าที่จัดการกับพื้นที่ที่เสียโปรแกรมระบบทำหน้าที่จัดการกับพื้นที่ที่เสีย
การจัดการเกี่ยวกับ Bad Blocks
เนื่องจากดิสก์มีชิ้นส่วนที่เคลื่อนไหวและมีความคงทนต่อการใช้งานไม่มากนัก ซึ่งจะทำให้มีโอกาสที่ดิสก์จะเกิดความเสียหายได้จากการเคลื่อนที่ของหัวอ่าน ซึ่งบางครั้งอาจจะเสียหายทั้งหมด หรือเสียหายเป็นบางเซ็กเตอร์ (Bad sector)
วิธีการจัดการกับดิสก์ที่มี Bad Blocks หรือ Bad sector ตัว OS จะทำการทดสอบดิสก์และจะบันทึกรายการของ Bad sector ลงบนดิสก์ และแต่ละ Bad sector จะมีเซ็กเตอร์ที่ใช้สำรองสำหรับ Bad sector นั้น
วิธีการจัดการในปัจจุบัน OS ทำอยู่ 2 วิธี
ใช้เซ็กเตอร์สำรองที่มีแทน Bad sector ที่เสีย
ขยับข้าม Bad sector ซึ่งวิธีนี้จะต้องมีการก็อปปี้ข้อมูลทั้งหมดและบันทึกลงไปใหม่
อุปกรณ์เสมือน
คือการนำเอาอุปกรณ์ชนิดหนึ่งมาจำลองการทำงานเป็นอุปกรณ์อีกชนิดหนึ่ง เพื่อให้เกิดความคล่องตัวในการทำงานของระบบ
ตัวอย่างของการทำอุปกรณ์เสมือนคือการทำแรมดิสก์ (RAM Disk)
อีกวิธีที่นิยมคือการทำสพูล SPOOL (Simultaneous Peripheral Operation On-Line)
การทำสพูล SPOOL
เป็นการใช้อุปกรณ์ที่มีความเร็วสูงมาทำงานแทนอุปกรณ์ที่มีความเร็วต่ำ
เช่นการใช้ดิสก์แทนเครื่องพิมพ์ เนื่องจากดิสก์มีการรับส่งข้อมูลได้รวดเร็วกว่าเครื่องพิมพ์มากหลายเท่า
โดยมีโปรเซสหนึ่งของ OS ชื่อ SPOOLER ทำหน้าที่จัดการเรื่องการทำ SPOOL ของระบบ

ขอขอบคุณข้อมูลจาก
www.chantra.sru.ac.th/os.html



ความคิดเห็น
แสดงความคิดเห็น